Workshops
The Call for Papers/Posters for Workshops is open until July 10, 2023.
Submission link: https://easychair.org/conferences/?conf=ecmr2023
Please select on EasyChair the workshop to which you wish to submit your work.
IMPORTANT NOTICE: The best regular papers (6-page papers) accepted in workshops will be eventually selected to be included in the conference proceedings and thus published in IEEExplore. The selection criteria will be the scientific significance/novelty of the papers and the reviewers’ feedback. Don’t miss this last chance to have your work published in official ECMR 2023 proceedings, in IEEExplore!
Workshops Program at a Glance
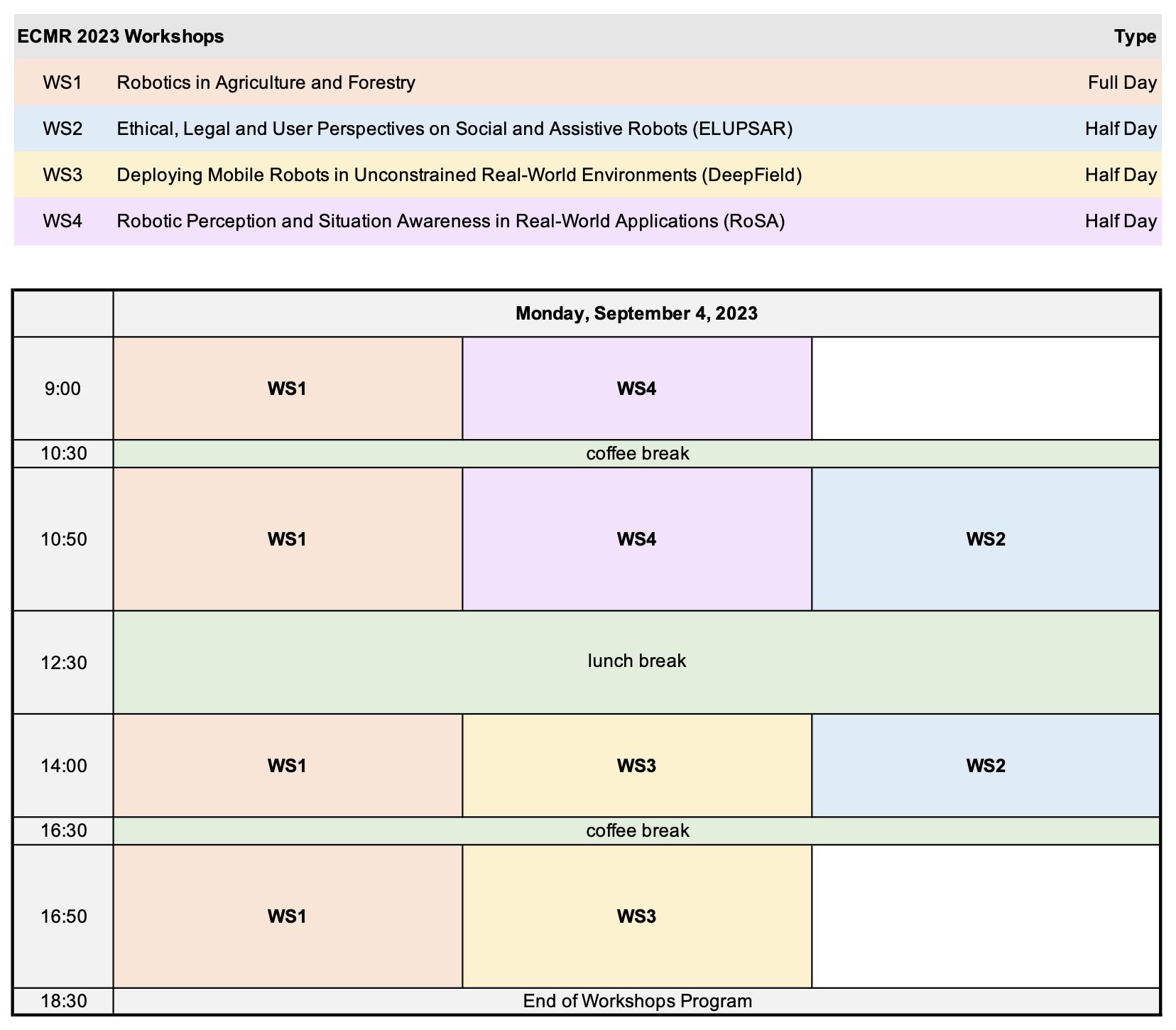
WS1: Robotics in Agriculture and Forestry
Full-day
Organizers:
Federico Magistri, Institute of Geodesy and Geoinformation, University of Bonn, Germany
Nived Chebrolu, Oxford Robotics Institute, University of Oxford, UK
Marija Popović, Institute of Geodesy and Geoinformation, University of Bonn, Germany
Elias Marks, Institute of Geodesy and Geoinformation, University of Bonn, Germany
Karoline Heiwolt, Lincoln Centre for Autonomous Systems, University of Lincoln, UK
Synopsis
With the world population projected to reach 9.6 billion by 2050, changes in agricultural and forest management practices using new technologies and artificial intelligence will play a key role in meeting rising food demands, biodiversity, and environmental sustainability. Recent years have seen impressive advances in the area of agricultural robotics: robots are increasingly being used in applications such as crop phenotyping, harvesting, biodiversity monitoring, weed control, fruit picking, targeted spraying of pesticides and fertilizers, and more. These exciting scenarios create new challenges for research and innovation in different robotic fields, including perception, motion planning, manipulation, learning, and decision-making, which must be tackled to improve the capabilities of autonomous systems in challenging environments. A key aspect of research problems in autonomy for agricultural robots is their interdisciplinary nature that spans both robotics and natural sciences.
This workshop focuses on recent advances in robotics and automation applied to agriculture and forestry. The objective is to bring together researchers and practitioners to share ideas and approaches enabling robotic systems in such contexts. The workshop will offer an overview of the state of the art through a series of invited and contributed talks, and discussions among participants will be encouraged to exchange knowledge, brainstorm new ideas, and envision the future of this field. In particular, emphasis will be placed on fostering the link between robotic platforms and domain-specific knowledge from plant sciences for real-world applications.
Webpage
https://sites.google.com/view/ecmr2023agriws/home
WS2: Ethical, Legal and User Perspectives on Social and Assistive Robots (ELUPSAR)
Half-day
Organizers:
Jim Torresen, Robotics & Intelligent Systems Research Group, University of Oslo, Norway
Tobias Mahler, Faculty of Law, University of Oslo, Norway
Diana Saplacan, Robotics & Intelligent Systems Research Group, Univ. of Oslo, Norway
Synopsis
We are witnessing the transition of robots from labs to publicly accessible spaces where they interact more with humans. This requires an increased focus on human-robot interaction, raising inherent ethical and legal issues. The workshop will give the audience insight into regulations and initiatives, addressing the main ethical implications and legal issues currently being discussed and also how these can open up new directions in research related to robotics and AI systems.
Measures to address the implications and issues are important to make robots more relevant for human interaction and assistance and are especially important when addressing Social Assistive Robots (SARs). The workshop will present some of these aspects through concrete examples from ongoing research projects, including challenges and opportunities with introducing SARs in the home- and healthcare settings. Based on our previous and ongoing research, we will showcase concrete ethical aspects, related to privacy and safety, as described by the users themselves. In our work, we have included both vulnerable users (e.g., elderly), and non-vulnerable users (young adults) that had no previous experience with robots. Similarly, we will discuss other legal considerations, the development of relevant standards, universal design principles and more. This will be discussed from an international perspective.
Webpage
WS3: Deploying Mobile Robots in Unconstrained Real-World Environments (DeepField)
Half-day
Organizers:
Gianluca Bardaro, Artificial Intelligence and Robotics Lab, Politecnico di Milano, Italy
Ana Paula Lima, INESC-TEC, ISEP, Portugal
Agnese Chiatti, Artificial Intelligence and Robotics Lab, Politecnico di Milano, Italy
Synopsis
Autonomous robots are expected to carry out tasks that are inconvenient or unsafe for humans, such as inspecting critical infrastructure or exploring hostile environments. Prominent examples of such tasks include underwater and space exploration, nuclear decommissioning, underground tunnel inspection, and search and rescue operations. To deploy robots effectively in real-world environments, many challenges have to be addressed that concern the robots’ sensemaking, planning, decision-making and deliberation capabilities.
Real-world operational scenarios are often characterised by high levels of uncertainty and frequent changes. Limited sensor availability and increased risk of system failures are common issues in challenging operational settings. In particularly extreme scenarios, robots are expected to complete their tasks before their hardware is compromised, e.g., due to radiation or other hostile environmental conditions. The fact that field robots often need to operate autonomously for extended periods further exacerbates these challenges. As a result, current systems are either overly specialised for particular tasks or generalise only in constrained and simulated environments. While laboratory and simulation studies can provide valuable insights, the gap between experiments in artificial environments and unconstrained real-world settings remains.
Webpage
https://airlab-polimi.github.io/Deepfield/
WS4: Robotic Perception and Situation Awareness in Real-World Applications (RoSA)
Half-day
Organizers:
Cristiano Premebida, Institute of Systems and Robotics, University of Coimbra, Portugal
Cunjia Liu, The Autonomous Systems Laboratory, Loughborough University, UK
Cédric Pradalier, DREAM Lab, GeorgiaTech Lorraine, France
Jingjing Jiang, Dept. of Aeronautical and Automotive Eng., Loughborough University, UK
Synopsis
The aim and scope of the ROSA workshop are to bring together researchers, professionals, policymakers, stakeholders and experts in perception, situational awareness, sensing, deep learning and applied machine learning to discuss current and future challenges of robotic perception and situation awareness systems, emerging technologies in multimodal perception, and the role of perception (single or multimodality) in real-world application domains (e.g., autonomous robots, field robotics, agricultural robotics, applied robotics).
The key scientific and technological objectives of the ROSA workshop are to discuss ongoing and promising challenges and opportunities, during the keynote speakers’ session and the Posters’ session, related to the following areas: deep and multimodal perception systems applied to mobile robotics in general, aerial robotics, agricultural and field robotics, autonomous robotic systems, and related applications; calibrated, probabilistic, explainable, interpretable, multimodal perception to increase reliability and robustness of robot systems.